机器人、动力学与仿真
机器人
机器人 Robot 结构体是物理系统的数字孪生。它负责存储机器人的所有静态属性与动态历史,是整个仿真框架的数据锚点。
它的核心构成包括:
structure(物理结构):维护多体系统的拓扑连接(详见 结构),包含所有的刚柔体 (Body)、关节 (Joint) 与外力装置 (Apparatus)(详见 体与器)。hub(控制枢纽):统一管理控制所需的执行器 (Actuators) 和量器 (Gauges)(详见 控制枢纽)。轨迹容器:持久化存储仿真推演过程中的所有数据,包括
traj(状态轨迹)、contacts_traj(接触轨迹)和control_traj(控制变量轨迹)。
动力学与仿真
Rible 提供了一个灵活的动力学仿真框架,支持多种积分算法、接触力学模型和控制策略。
核心架构:在 Rible 中,物理模型 (
DynamicsProblem) 与 计算策略 (DynamicsSolver) 分离。这意味着您可以对同一个物理系统无缝切换不同的求解算法,而无需修改任何模型定义。
核心组件
动力学问题 DynamicsProblem
DynamicsProblem 是仿真任务的数据容器。它是一个不可变结构体,用于绑定物理系统及其环境的所有静态属性,为求解器提供明确的计算边界。
它主要包含以下要素:
Robot(机器人):机械系统的拓扑结构、质量分布和运行时状态(详见 机器人)。Objective(优化目标):用于伴随分析代价函数(详见 误差、代价与灵敏度分析)。Environment(环境):提供几何空间与连续的被动外力。力场 (
Field):提供全局外力,如重力场 (Gravity)。几何体 (
Geometry):提供用于碰撞检测的表面或网格地形。
Policy(控制策略):将当前系统状态映射为主动控制力 u。Models(交互模型):约束物理交互的数学形式,如接触模型(AbstractContactModel)。
动力学求解器 DynamicsSolver
如果说 DynamicsProblem 负责定义“是什么”,那么 DynamicsSolver 则负责“怎么算”。它本身不存储物理状态,而是将不同的数值积分器与子求解器组合起来,用于计算系统的演化。
积分器 (
Integrator):指明积分格式,即计算离散时间步上的下一个系统状态。 子求解器:包含物体求解器、装置求解器以及接触求解器。
积分器选择
积分器是 DynamicsSolver 的数值引擎。选择合适的积分器对仿真的稳定性与精度至关重要。
Zhong 06
对于大多数带约束的多体系统,这是默认推荐的积分器。最早由钟万勰提出,后改进并用于接触动力学 [1]。它是一种二阶、保约束且类辛的格式,能够长时间保持能量守恒与约束流形。
# 使用默认设置构造
integrator = Zhong06()
solver = DynamicsSolver(integrator)DynamicsSolver{Zhong06, Rible.NoBodySolver, Rible.NoApparatusSolver, Rible.NoContactSolver, @NamedTuple{}}(Zhong06(), Rible.NoBodySolver(), Rible.NoApparatusSolver(), Rible.NoContactSolver(), NamedTuple())龙格-库塔法
通过 RungeKutta.jl 支持各种隐式 Runge-Kutta 格式,如 Gauss-Legendre。隐式 RK 方法非常适合对平滑系统有高精度要求的场景。
using RungeKutta
# 构造一个二阶 Gauss-Legendre (隐式) 积分器
integrator = RKIntegrator(RungeKutta.TableauGauss(2))
solver = DynamicsSolver(integrator)DynamicsSolver{RKIntegrator{RungeKutta.Tableau{Float64, 2, Int64, 4}}, Rible.NoBodySolver, Rible.NoApparatusSolver, Rible.NoContactSolver, @NamedTuple{}}(RKIntegrator{RungeKutta.Tableau{Float64, 2, Int64, 4}}(
Runge-Kutta Tableau Gauss with 2 stages and order 4:
0.211325 │ 0.25 -0.0386751
0.788675 │ 0.538675 0.25
──────────┼──────────────────────
│ 0.5 0.5
), Rible.NoBodySolver(), Rible.NoApparatusSolver(), Rible.NoContactSolver(), NamedTuple())额外积分器 (Generalized-α, Moreau-Jean)
为满足对比验证的需要,Rible 在 RibleExtraIntegrators 扩展包中提供了更多积分器。
典型仿真流程
1. 便捷 API:solve!
对于大多数标准场景,直接使用 solve! 方法即可。它会在底层自动完成内存分配并推演主循环。
下面的示例复用了仓库中的旋转陀螺模型。该陀螺具有较高的初始自旋速度,会与平面地面发生接触,并生成可供后续检查的轨迹。
include(joinpath(pathof(Rible), "../../examples/robots/spinningtop.jl"))
origin_position = [0.0, 0.0, 0.5]
R = RotX(0.0)
origin_velocity = [1.0, 0.0, 0.0]
Ω = [0.0, 0.0, 200.0]
top = make_top(origin_position, R, origin_velocity, Ω, :NCF; μ = 0.95, e = 0.5, loadmesh = false)
top.structure.connectivity.num_of_bodies1这个模型已经内置了 Structure 与 ControlHub,下一步只需定义接触表面与交互模型。
planes = StaticContactSurfaces([
HalfSpace([0.0, 0.0, 1.0], [0.0, 0.0, 0.0]),
])
contact_model = RestitutionFrictionCombined(
NewtonRestitution(),
CoulombFriction(),
)
prob = DynamicsProblem(top; env=planes, contact_model)DynamicsProblem{Robot{Structure{TypeSortedCollections.TypeSortedCollection{Tuple{Vector{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}}, 1}, Vector{Int64}, Connectivity{Vector{Vector{Int64}}}, Rible.StructureState{CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}, Vector{CoordinatesState{Float64, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, Vector{Float64}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}}}}, @NamedTuple{activated_bits::BitVector, persistent_bits::BitVector, friction_coefficients::Vector{Float64}, restitution_coefficients::Vector{Float64}, gaps::Vector{Float64}}, Rible.StructureCache{InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseVector{Float64, Int64}}}}, ControlHub{Vector{Int64}, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ErrorGauge{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, PositionCaptum, Vector{Float64}}}}, 1}, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ExternalForceActuator{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, NaiveOperator, Vector{Float64}, Float64}}}, 1}, Coalition, @NamedTuple{c::Vector{Float64}, e::Vector{Float64}, u::Vector{Float64}}}, StructArrays.StructVector{CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}, @NamedTuple{t::Vector{Float64}, q::Vector{Vector{Float64}}, q̇::Vector{Vector{Float64}}, q̈::Vector{Vector{Float64}}, F::Vector{Vector{Float64}}, λ::Vector{Vector{Float64}}, s::Vector{Vector{Float64}}, p::Vector{Vector{Float64}}, c::Vector{Vector{Float64}}}, Int64}, Vector{Vector{Rible.Contact{Float64}}}, Vector{@NamedTuple{na::Int64, bodyid2act_idx::Vector{Vector{Int64}}, persistent_idx::Vector{Int64}, activated_bits::BitVector, H::LinearAlgebra.Diagonal{Float64, Vector{Float64}}, activated_restitution_coefficients::Vector{Float64}, D::Matrix{Float64}, Dper::Matrix{Float64}, Dimp::Matrix{Float64}, ∂Dq̇∂q::Matrix{Float64}, ∂DᵀΛ∂q::Matrix{Float64}, ŕ::Vector{Float64}, L::Matrix{Float64}, Lv::Matrix{Float64}, Λ::Vector{Float64}, Γ::Vector{Float64}}}, StructArrays.StructVector{@NamedTuple{c::Vector{Float64}, e::Vector{Float64}, u::Vector{Float64}}, @NamedTuple{c::Vector{Vector{Float64}}, e::Vector{Vector{Float64}}, u::Vector{Vector{Float64}}}, Int64}}, Rible.NoPolicy, Rible.StaticEnvironment{Vector{HalfSpace{Float64, 3}}, Rible.Gravity{Float64}}, Objective{Vector{Int64}, Rible.var"#default_objective##0#default_objective##1"}, RestitutionFrictionCombined{NewtonRestitution, CoulombFriction}, Rible.Naive, @NamedTuple{}}(Robot{Structure{TypeSortedCollections.TypeSortedCollection{Tuple{Vector{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}}, 1}, Vector{Int64}, Connectivity{Vector{Vector{Int64}}}, Rible.StructureState{CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}, Vector{CoordinatesState{Float64, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, Vector{Float64}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}}}}, @NamedTuple{activated_bits::BitVector, persistent_bits::BitVector, friction_coefficients::Vector{Float64}, restitution_coefficients::Vector{Float64}, gaps::Vector{Float64}}, Rible.StructureCache{InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseVector{Float64, Int64}}}}, ControlHub{Vector{Int64}, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ErrorGauge{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, PositionCaptum, Vector{Float64}}}}, 1}, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ExternalForceActuator{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, NaiveOperator, Vector{Float64}, Float64}}}, 1}, Coalition, @NamedTuple{c::Vector{Float64}, e::Vector{Float64}, u::Vector{Float64}}}, StructArrays.StructVector{CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}, @NamedTuple{t::Vector{Float64}, q::Vector{Vector{Float64}}, q̇::Vector{Vector{Float64}}, q̈::Vector{Vector{Float64}}, F::Vector{Vector{Float64}}, λ::Vector{Vector{Float64}}, s::Vector{Vector{Float64}}, p::Vector{Vector{Float64}}, c::Vector{Vector{Float64}}}, Int64}, Vector{Vector{Rible.Contact{Float64}}}, Vector{@NamedTuple{na::Int64, bodyid2act_idx::Vector{Vector{Int64}}, persistent_idx::Vector{Int64}, activated_bits::BitVector, H::LinearAlgebra.Diagonal{Float64, Vector{Float64}}, activated_restitution_coefficients::Vector{Float64}, D::Matrix{Float64}, Dper::Matrix{Float64}, Dimp::Matrix{Float64}, ∂Dq̇∂q::Matrix{Float64}, ∂DᵀΛ∂q::Matrix{Float64}, ŕ::Vector{Float64}, L::Matrix{Float64}, Lv::Matrix{Float64}, Λ::Vector{Float64}, Γ::Vector{Float64}}}, StructArrays.StructVector{@NamedTuple{c::Vector{Float64}, e::Vector{Float64}, u::Vector{Float64}}, @NamedTuple{c::Vector{Vector{Float64}}, e::Vector{Vector{Float64}}, u::Vector{Vector{Float64}}}, Int64}}(Structure{TypeSortedCollections.TypeSortedCollection{Tuple{Vector{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}}, 1}, Vector{Int64}, Connectivity{Vector{Vector{Int64}}}, Rible.StructureState{CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}, Vector{CoordinatesState{Float64, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, Vector{Float64}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}}}}, @NamedTuple{activated_bits::BitVector, persistent_bits::BitVector, friction_coefficients::Vector{Float64}, restitution_coefficients::Vector{Float64}, gaps::Vector{Float64}}, Rible.StructureCache{InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseVector{Float64, Int64}}}}(3, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}}, 1}((RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}[RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}(RigidBodyProperty{3, Float64, 9}(true, true, 1, :generic, 0.5838707, [0.00022129 0.0 0.0; 0.0 0.00022129 0.0; 0.0 0.0 0.00030207], Locus{3, Float64, 9}([0.0, 0.0, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.0, 0.0), Locus{3, Float64, 9}[Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.0, 0.0, -0.03795882], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.0, 0.0, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5)]), RigidBodyState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], [0.0, 0.0, 200.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}[Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.46204118], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0])]), NC{3, 3, Float64, 9, 12, 144}(1, 3, LNCData{3, 3, Float64, 9}([0.0, 0.0, 0.0], [1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0], [1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0]), [1 0 … 0 0; 0 1 … 0 0; … ; 0 0 … 1 0; 0 0 … 0 1], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 1 0; 0 0 … 0 1], LinearAlgebra.Symmetric{Int64, SparseArrays.SparseMatrixCSC{Int64, Int64}}[[0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 2 0; 0 0 … 0 2], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0]], 6, [1, 2, 3, 4, 5, 6]), RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}([1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], StaticArraysCore.SMatrix{3, 12, Float64, 36}[[1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … -0.03795882 0.0; 0.0 0.0 … 0.0 -0.03795882], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0]], InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}(sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [0.5838707, 0.5838707, 0.5838707, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 7.025499999999997e-5, 7.025499999999997e-5, 7.025499999999997e-5], 12, 12), sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1.7127079677058636, 1.7127079677058636, 1.7127079677058636, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 14233.862358551, 14233.862358551, 14233.862358551], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], false), [0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0; … ; 0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0]), Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}}(...))],), ([1],)), Int64[], Connectivity{Vector{Vector{Int64}}}(1, 0, 0, 0, 12, 6, 0, 6, 6, 6, 0, [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [[1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12]], [[1, 2, 3, 4, 5, 6]], [[1, 2, 3, 4, 5, 6]], Vector{Int64}[], Vector{Int64}[], [[1, 2, 3, 4, 5, 6]], Signifier{Int64}[Signifier{Int64}(1, 1), Signifier{Int64}(1, 2), Signifier{Int64}(1, 3), Signifier{Int64}(1, 4), Signifier{Int64}(1, 5), Signifier{Int64}(1, 6)], [[1, 2, 3], [4, 5, 6], [7, 8, 9], [10, 11, 12], [13, 14, 15], [16, 17, 18]], [[1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18]], 7, 18, 18, 0, 18, Vector{Int64}[], 0, [Int64[]], Vector{Int64}[]), Rible.StructureState{CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}, Vector{CoordinatesState{Float64, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, Vector{Float64}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}}}}(CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}(0.0, [0.0, 0.0, 0.5, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0], [1.0, 0.0, 0.0, 0.0, 200.0, 0.0, -200.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0], Float64[], [0.5838707, 0.0, 0.0, 0.0, 0.030206999999999994, 0.0, -0.030206999999999994, 0.0, 0.0, 0.0, 0.0, 0.0], [0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.0, 0.0, -0.03795882, 0.0, 0.0, 0.0]), CoordinatesState{Float64, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, Vector{Float64}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}}[CoordinatesState{Float64, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}, Vector{Float64}, SubArray{Float64, 1, Vector{Float64}, Tuple{Vector{Int64}}, false}}(0.0, [0.0, 0.0, 0.5, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0], [1.0, 0.0, 0.0, 0.0, 200.0, 0.0, -200.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0], Float64[], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.0, 0.0, -0.03795882, 0.0, 0.0, 0.0])]), (activated_bits = Bool[0, 0, 0, 0, 0, 0], persistent_bits = Bool[0, 0, 0, 0, 0, 0], friction_coefficients = [0.95, 0.95, 0.95, 0.95, 0.95, 0.95], restitution_coefficients = [0.5, 0.5, 0.5, 0.5, 0.5, 0.5], gaps = [Inf, Inf, Inf, Inf, Inf, Inf]), Rible.StructureCache{InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseVector{Float64, Int64}}}(InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseVector{Float64, Int64}}(sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [0.5838707, 0.5838707, 0.5838707, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 7.025499999999997e-5, 7.025499999999997e-5, 7.025499999999997e-5], 12, 12), sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1.7127079677058636, 1.7127079677058636, 1.7127079677058636, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 14233.862358551, 14233.862358551, 14233.862358551], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), sparsevec(Int64[], Float64[], 12), sparsevec(Int64[], Float64[], 12), true))), ControlHub{Vector{Int64}, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ErrorGauge{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, PositionCaptum, Vector{Float64}}}}, 1}, TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ExternalForceActuator{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, NaiveOperator, Vector{Float64}, Float64}}}, 1}, Coalition, @NamedTuple{c::Vector{Float64}, e::Vector{Float64}, u::Vector{Float64}}}(Int64[], TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ErrorGauge{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, PositionCaptum, Vector{Float64}}}}, 1}((ErrorGauge{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, PositionCaptum, Vector{Float64}}[ErrorGauge{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, PositionCaptum, Vector{Float64}}(1, Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}(RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}(RigidBodyProperty{3, Float64, 9}(true, true, 1, :generic, 0.5838707, [0.00022129 0.0 0.0; 0.0 0.00022129 0.0; 0.0 0.0 0.00030207], Locus{3, Float64, 9}([0.0, 0.0, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.0, 0.0), Locus{3, Float64, 9}[Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.0, 0.0, -0.03795882], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.0, 0.0, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5)]), RigidBodyState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], [0.0, 0.0, 200.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}[Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.46204118], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0])]), NC{3, 3, Float64, 9, 12, 144}(1, 3, LNCData{3, 3, Float64, 9}([0.0, 0.0, 0.0], [1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0], [1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0]), [1 0 … 0 0; 0 1 … 0 0; … ; 0 0 … 1 0; 0 0 … 0 1], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 1 0; 0 0 … 0 1], LinearAlgebra.Symmetric{Int64, SparseArrays.SparseMatrixCSC{Int64, Int64}}[[0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 2 0; 0 0 … 0 2], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0]], 6, [1, 2, 3, 4, 5, 6]), RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}([1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], StaticArraysCore.SMatrix{3, 12, Float64, 36}[[1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … -0.03795882 0.0; 0.0 0.0 … 0.0 -0.03795882], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0]], InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}(sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [0.5838707, 0.5838707, 0.5838707, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 7.025499999999997e-5, 7.025499999999997e-5, 7.025499999999997e-5], 12, 12), sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1.7127079677058636, 1.7127079677058636, 1.7127079677058636, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 14233.862358551, 14233.862358551, 14233.862358551], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], false), [0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0; … ; 0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0]), Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}}(...)), 6), PositionCaptum(), [0.5, 0.0, 0.2])],), ([1],)), TypeSortedCollections.TypeSortedCollection{Tuple{Vector{ExternalForceActuator{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, NaiveOperator, Vector{Float64}, Float64}}}, 1}((ExternalForceActuator{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, NaiveOperator, Vector{Float64}, Float64}[ExternalForceActuator{Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}, NaiveOperator, Vector{Float64}, Float64}(1, Signifier{RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}}(RigidBody{3, 3, Float64, 9, NC{3, 3, Float64, 9, 12, 144}, RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}, GeometryBasics.Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}, (:position, :normal), Tuple{Vector{GeometryBasics.Point{3, Float64}}, Vector{GeometryBasics.Vec{3, Float64}}}, Vector{GeometryBasics.TriangleFace{Int64}}}}(RigidBodyProperty{3, Float64, 9}(true, true, 1, :generic, 0.5838707, [0.00022129 0.0 0.0; 0.0 0.00022129 0.0; 0.0 0.0 0.00030207], Locus{3, Float64, 9}([0.0, 0.0, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.0, 0.0), Locus{3, Float64, 9}[Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.0, 0.0, -0.03795882], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5), Locus{3, Float64, 9}([0.0, 0.0, 0.0], Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), 0.95, 0.5)]), RigidBodyState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], [0.0, 0.0, 200.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}[Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.03111269837220809, 0.03111269837220809, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.46204118], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0]), Rible.LocusState{3, 3, Float64, 9}(Rible.CartesianFrame{3, 3, Float64, 9}([0.0, 0.0, 0.5], Rible.Axes{3, Float64, 9}([0.0 0.0 1.0; 1.0 -0.0 0.0; 0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 200.0], [0.0, 200.0, 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0], Rible.ContactState{3, Float64, 9}(false, true, Inf, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]), [1.0, 0.0, 0.0])]), NC{3, 3, Float64, 9, 12, 144}(1, 3, LNCData{3, 3, Float64, 9}([0.0, 0.0, 0.0], [1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0], [1.0 0.0 0.0; 0.0 1.0 0.0; 0.0 0.0 1.0]), [1 0 … 0 0; 0 1 … 0 0; … ; 0 0 … 1 0; 0 0 … 0 1], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 1 0; 0 0 … 0 1], LinearAlgebra.Symmetric{Int64, SparseArrays.SparseMatrixCSC{Int64, Int64}}[[0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 2 0; 0 0 … 0 2], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0], [0 0 … 0 0; 0 0 … 0 0; … ; 0 0 … 0 0; 0 0 … 0 0]], 6, [1, 2, 3, 4, 5, 6]), RigidBodyCache{StaticArraysCore.SMatrix{3, 12, Float64, 36}, InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}, StaticArraysCore.MMatrix{6, 12, Float64, 72}}([1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], StaticArraysCore.SMatrix{3, 12, Float64, 36}[[1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … -0.03795882 0.0; 0.0 0.0 … 0.0 -0.03795882], [1.0 0.0 … 0.0 0.0; 0.0 1.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0]], InertiaCache{SparseArrays.SparseMatrixCSC{Float64, Int64}, SparseArrays.SparseMatrixCSC{Float64, Int64}, StaticArraysCore.MVector{12, Float64}}(sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [0.5838707, 0.5838707, 0.5838707, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 0.00015103499999999997, 7.025499999999997e-5, 7.025499999999997e-5, 7.025499999999997e-5], 12, 12), sparse([1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12], [1.7127079677058636, 1.7127079677058636, 1.7127079677058636, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 6620.981891614528, 14233.862358551, 14233.862358551, 14233.862358551], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), sparse(Int64[], Int64[], Float64[], 12, 12), [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], false), [0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0; … ; 0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0]), Mesh{3, Float64, GeometryBasics.TriangleFace{Int64}}(...)), 5), NaiveOperator(1), [0.0, 1.0, 0.0], [0.0])],), ([1],)), Coalition(1, 0, 1, 0, 1, Vector{Int64}[], [[1]], 1, [[1]]), (c = Float64[], e = [0.16999999999999998], u = [0.0])), CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}[CoordinatesState{Float64, Vector{Float64}, Vector{Float64}, Vector{Float64}, Vector{Float64}}(0.0, [0.0, 0.0, 0.5, 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0], [1.0, 0.0, 0.0, 0.0, 200.0, 0.0, -200.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [0.0, 0.0, 0.0, 0.0, 0.0, 0.0], Float64[], [0.5838707, 0.0, 0.0, 0.0, 0.030206999999999994, 0.0, -0.030206999999999994, 0.0, 0.0, 0.0, 0.0, 0.0], [0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.03111269837220809, 0.03111269837220809, 0.0, 0.0, 0.0, -0.03795882, 0.0, 0.0, 0.0])], Vector{Rible.Contact{Float64}}[[Rible.Contact{Float64}(1, 0.95, 0.5, Rible.ContactState{3, Float64, 9}(false, true, 1.0, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0])), Rible.Contact{Float64}(2, 0.95, 0.5, Rible.ContactState{3, Float64, 9}(false, true, 1.0, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0])), Rible.Contact{Float64}(3, 0.95, 0.5, Rible.ContactState{3, Float64, 9}(false, true, 1.0, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0])), Rible.Contact{Float64}(4, 0.95, 0.5, Rible.ContactState{3, Float64, 9}(false, true, 1.0, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0])), Rible.Contact{Float64}(5, 0.95, 0.5, Rible.ContactState{3, Float64, 9}(false, true, 1.0, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0])), Rible.Contact{Float64}(6, 0.95, 0.5, Rible.ContactState{3, Float64, 9}(false, true, 1.0, Rible.Axes{3, Float64, 9}([-0.0 -0.0 1.0; 1.0 -0.0 0.0; -0.0 1.0 0.0]), [0.0, 0.0, 0.0], [0.0, 0.0, 0.0]))]], @NamedTuple{na::Int64, bodyid2act_idx::Vector{Vector{Int64}}, persistent_idx::Vector{Int64}, activated_bits::BitVector, H::LinearAlgebra.Diagonal{Float64, Vector{Float64}}, activated_restitution_coefficients::Vector{Float64}, D::Matrix{Float64}, Dper::Matrix{Float64}, Dimp::Matrix{Float64}, ∂Dq̇∂q::Matrix{Float64}, ∂DᵀΛ∂q::Matrix{Float64}, ŕ::Vector{Float64}, L::Matrix{Float64}, Lv::Matrix{Float64}, Λ::Vector{Float64}, Γ::Vector{Float64}}[(na = 0, bodyid2act_idx = [[0, 0, 0, 0, 0, 0]], persistent_idx = [], activated_bits = [0, 0, 0, 0, 0, 0], H = Diagonal(Float64[]), activated_restitution_coefficients = [], D = Matrix{Float64}(undef, 0, 12), Dper = Matrix{Float64}(undef, 0, 12), Dimp = Matrix{Float64}(undef, 0, 12), ∂Dq̇∂q = Matrix{Float64}(undef, 0, 12), ∂DᵀΛ∂q = [0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0; … ; 0.0 0.0 … 0.0 0.0; 0.0 0.0 … 0.0 0.0], ŕ = [], L = Matrix{Float64}(undef, 0, 0), Lv = Matrix{Float64}(undef, 0, 0), Λ = [], Γ = [])], [(c = Float64[], e = [0.16999999999999998], u = [0.0])]), Rible.NoPolicy(), Rible.StaticEnvironment{Vector{HalfSpace{Float64, 3}}, Rible.Gravity{Float64}}(HalfSpace{Float64, 3}[HalfSpace{Float64, 3}([0.0, 0.0, 1.0], -0.0, [0.0, 0.0, 0.0])], Rible.Gravity{Float64}(9.81)), Objective{Vector{Int64}, Rible.var"#default_objective##0#default_objective##1"}([0], [0], [0], [0], Rible.var"#default_objective##0#default_objective##1"()), RestitutionFrictionCombined{NewtonRestitution, CoulombFriction}(NewtonRestitution(), CoulombFriction()), Rible.Naive(), NamedTuple())准备完成后,再定义带接触求解器的 DynamicsSolver 并执行一次短时积分。
solver = DynamicsSolver(
Zhong06(),
InnerLayerContactSolver(InteriorPointMethod()),
)
sim_result = solve!(
prob,
solver;
tspan = (0.0, 0.2),
dt = 5e-4,
ftol = 1e-14,
maxiters = 50,
exception = false,
)
tip_position = get_trajectory!(top, 1, 1).u[end]
tip_velocity = get_velocity!(top, 1, 1).u[end]
tip_position, tip_velocity([0.15600299208285673, -0.0005131221482334511, 0.3038000000022407], [1.1026244296463368, -8.799401583428741, -1.9619999999775923])2. 仿真容器 Simulator
Simulator 是负责维护运行状态的执行容器。DynamicsProblem 和 DynamicsSolver 本身是无状态的。
当你需要精细控制主循环(如结合外部强化学习框架、添加运行时控制器或实现异常热重启)时,应该显式创建 Simulator 并逐步执行:
下面先创建 Simulator,再调用针对容器的 solve!。
top_restart = make_top(origin_position, R, origin_velocity, Ω, :NCF; μ = 0.95, e = 0.5, loadmesh = false)
prob_restart = DynamicsProblem(top_restart; env=planes, contact_model)
sim = Simulator(prob_restart, solver; tspan = (0.0, 0.02), dt = 5e-4, restart = true)
solve!(sim, solver; dt = 5e-4)
traj_len_sim = length(top_restart.traj)
t_end_sim = top_restart.traj.t[end]
traj_len_sim, t_end_sim(41, 0.02)完成积分后,可以直接从陀螺模型的轨迹容器提取后处理指标。
mechanical_energy! 用于检查积分过程中的能量行为,常用于快速诊断动力学是否符合预期。
E = mechanical_energy!(top).E
E[begin], E[end](6.333335349999999, 7.45712413142055)如果希望直接查看路径,可以先用 get_trajectory! 提取一个点的空间轨迹,再用 Makie.lines 绘制三维曲线。
tip_traj = get_trajectory!(top, 1, 1).u
tip_points = Point3.(tip_traj)
fig_traj = Figure()
ax_traj = Axis3(fig_traj[1, 1], aspect = :data)
Makie.lines!(ax_traj, tip_points, linewidth = 2)
fig_traj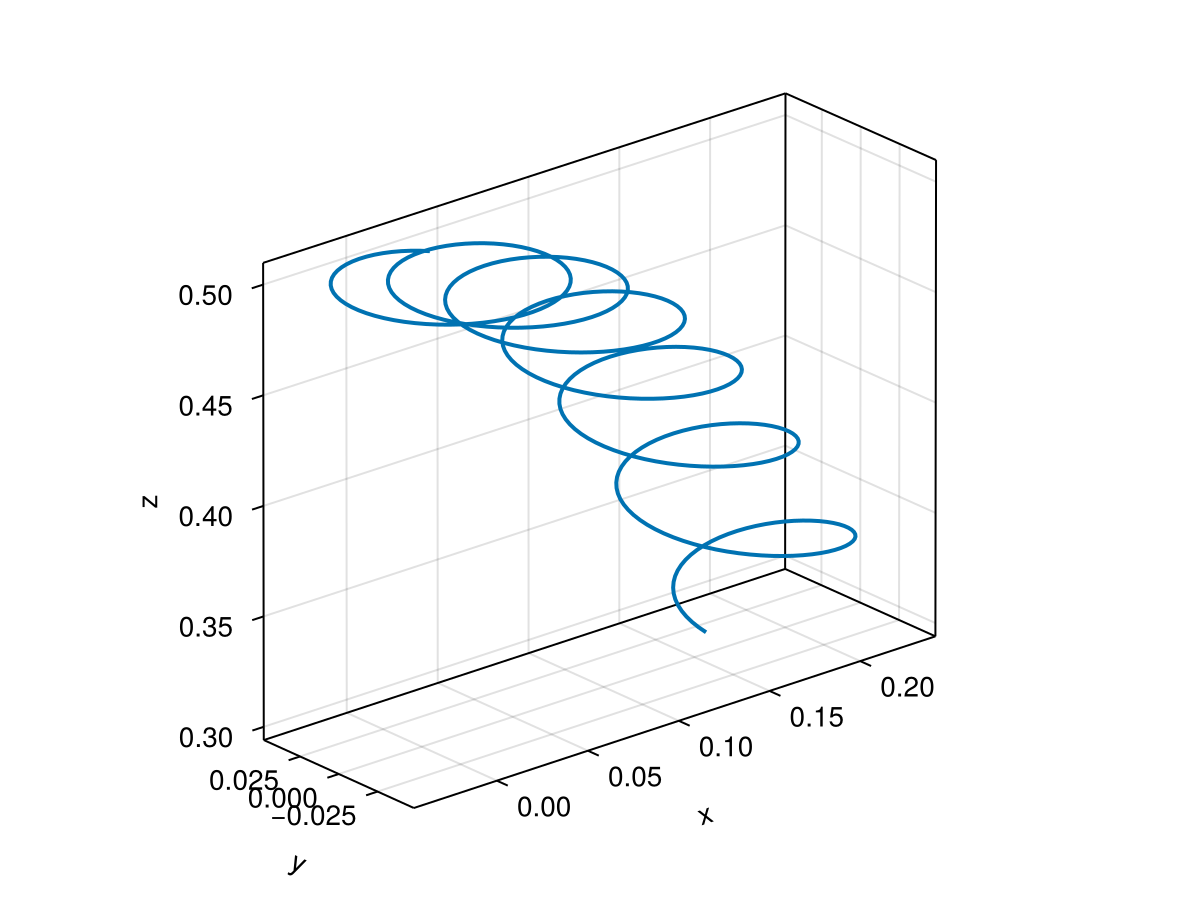
此外,轨迹数据也可以继续对接到可视化页面中的工作流,生成更丰富的动画与图形。
核心机制与性能优化
Rible 利用多重分派 (Multiple Dispatch) 与特性系统 (Traits) 来优化计算性能。 2. 轨迹内存预分配 (prepare_traj!) 初始化 Simulator 时自动调用。它会为整个时间段内的状态序列预先分配连续的内存块。
工作空间自动生成 (
generate_cache) 仿真开始前,根据问题与求解器的具体类型,在编译期生成专属的工作空间 (Workspace),用于缓存矩阵(如雅可比矩阵)。基于特性 (Traits) 的分派优化 通过
has_constant_mass_matrix(bot)判断质量矩阵是否为常数。若是,将自动跳过所有时间步的质量矩阵重复计算。
参考文献
- J. Luo, X. Xu, X. Liu and Z. Wu. A Nonsmooth Modified Symplectic Integration Scheme for Frictional Contact Dynamics of Rigid–Flexible Multibody Systems. Computer Methods in Applied Mechanics and Engineering 420, 116726 (2024). Accessed on Jan 18, 2024.